Abstract class that has functions of common RTOS's thread. More...
#include <Thread.h>
Classes | |
| class | UncaughtExceptionHandler |
| Interface for handling uncaught exception. More... | |
Public Member Functions | |
| virtual void | start ()=0 |
| Transit this thread to the READY state. | |
| virtual Error | wait ()=0 |
| Block the current thread until this thread transits to the FINISHED state. | |
| virtual Error | tryWait ()=0 |
| Query without blocking whether this thread is in the FINISHED state. | |
| virtual Error | timedWait (Timeout tmout)=0 |
| Block the current thread until this thread transits to the FINISHED state but only within the limited time. | |
| virtual bool | isFinished () const =0 |
| Return true if this thread is in the FINISHED state. | |
| virtual void | setName (const char *name)=0 |
| Set the object's name. | |
| virtual const char * | getName () const =0 |
| Get the object's name. | |
| virtual void | setPriority (int priority)=0 |
| Change this thread priority. | |
| virtual int | getPriority () const =0 |
| Get this thread priority. | |
| virtual int | getInitialPriority () const =0 |
| Get this thread priority when this thread was created. | |
| virtual std::size_t | getStackSize () const =0 |
| Get the stack size of this thread. | |
| virtual void * | getNativeHandle ()=0 |
| Get the native handle of RTOS's thread. | |
| void | setUncaughtExceptionHandler (UncaughtExceptionHandler *handler) |
| Set the UncaughtExceptionHandler for this Thread. | |
| UncaughtExceptionHandler * | getUncaughtExceptionHandler () const |
| Get the UncaughtExceptionHandler for this Thread. | |
Static Public Member Functions | |
| static void | setDefaultUncaughtExceptionHandler (UncaughtExceptionHandler *handler) |
| Set the default UncaughtExceptionHandler for all the Thread. | |
| static UncaughtExceptionHandler * | getDefaultUncaughtExceptionHandler () |
| Get the default UncaughtExceptionHandler. | |
| static Thread * | create (Runnable *r, int priority=INHERIT_PRIORITY, std::size_t stackSize=0U, void *stackAddress=0, const char *name="") |
| Create a Thread object. | |
| static void | destroy (Thread *t) |
| Destroy a Thread object. | |
| static void | sleep (unsigned long millis) |
| Sleep the current thread while the time that is set by argument. | |
| static void | yield () |
| Transit the current thread from the RUNNING state to the READY state to give other thread the RUNNING state. | |
| static Thread * | getCurrentThread () |
| Get the current running Thread object. | |
| static int | getMaxPriority () |
| Get the maximum value of RTOS's thread priority. | |
| static int | getMinPriority () |
| Get the minimum value of RTOS's thread priority. | |
| static int | getNormalPriority () |
| Get the middle priority between the minimum and maximum value. | |
| static int | getHighestPriority () |
| Get the highest thread priority of RTOS. | |
| static int | getLowestPriority () |
| Get the lowest thread priority of RTOS. | |
| static int | getPriorityHigherThan (int basePriority, int d) |
Get the thread priority of RTOS higher than basePriority by d. | |
Static Public Attributes | |
| static const int | INHERIT_PRIORITY = -1 |
| Use when set the same priority as the caller thread. | |
Protected Member Functions | |
| Thread (Runnable *r) | |
| virtual | ~Thread () |
| void | threadMain () |
| Common thread main method. | |
Detailed Description
Abstract class that has functions of common RTOS's thread.
This is the state machine diagram of Thread.
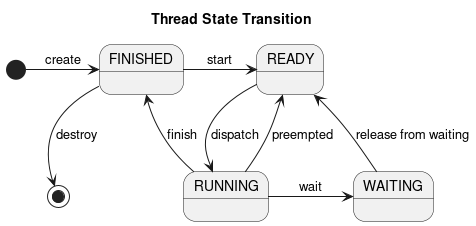
When the current thread calls some methods (for example Thread::wait(), Mutex::lock(), EventFlag::timedWait(), Thread::sleep(), etc), the state of current thread transits from RUNNING to WAITING. Then the waiting condition is satisfied or timed out, the state transits from WAITING to READY.
When the current thread runs through the end of Runnable::run(), the state of current thread transits from RUNNING to FINISHED.
Constructor & Destructor Documentation
◆ Thread()
|
inlineexplicitprotected |
◆ ~Thread()
|
inlineprotectedvirtual |
Member Function Documentation
◆ create()
|
static |
Create a Thread object.
- Parameters
-
r Pointer of Runnable object priority Thread priority. If INHERIT_PRIORITY then sets the priority of the caller thread. stackSize Stack size of thread. If zero then sets default stack size of RTOS. stackAddress Stack address of thread allocated by the caller. If null pointer then RTOS allocates the stack. name Name of the object
- Returns
- If this method succeeds then returns a pointer of Thread object, else returns null pointer
◆ destroy()
|
static |
Destroy a Thread object.
- Parameters
-
t Pointer of Thread object created by Thread::create()
- Note
- If t is null pointer, do nothing.
◆ getCurrentThread()
|
static |
Get the current running Thread object.
- Returns
- Pointer of the current Thread object
- Attention
- If current running thread is not created by Thread::create(), returns null pointer.
◆ getDefaultUncaughtExceptionHandler()
|
static |
Get the default UncaughtExceptionHandler.
- Returns
- The default UncaughtExceptionHandler object
◆ getHighestPriority()
|
static |
Get the highest thread priority of RTOS.
- Returns
- The highest thread priority
- Note
- Return value may be the maximum or minimum value by kinds of RTOS.
◆ getInitialPriority()
|
pure virtual |
Get this thread priority when this thread was created.
- Returns
- Initial thread priority
Implemented in StdCppOSWrapper::StdCppThreadFactory::StdCppThread, and TestDoubleOSWrapper::TestDoubleThread.
◆ getLowestPriority()
|
static |
Get the lowest thread priority of RTOS.
- Returns
- The lowest thread priority
- Note
- Return value may be the maximum or minimum value by kinds of RTOS.
◆ getMaxPriority()
|
static |
Get the maximum value of RTOS's thread priority.
- Returns
- The maximum value of thread priority
◆ getMinPriority()
|
static |
Get the minimum value of RTOS's thread priority.
- Returns
- The minimum value of thread priority
◆ getName()
|
pure virtual |
Get the object's name.
- Returns
- The object's name
Implemented in StdCppOSWrapper::StdCppThreadFactory::StdCppThread, and TestDoubleOSWrapper::TestDoubleThread.
◆ getNativeHandle()
|
pure virtual |
Get the native handle of RTOS's thread.
- Returns
- native handle
Implemented in StdCppOSWrapper::StdCppThreadFactory::StdCppThread, and TestDoubleOSWrapper::TestDoubleThread.
◆ getNormalPriority()
|
static |
Get the middle priority between the minimum and maximum value.
- Returns
- The middle priority between the minimum and maximum value
◆ getPriority()
|
pure virtual |
Get this thread priority.
- Returns
- Thread priority
Implemented in StdCppOSWrapper::StdCppThreadFactory::StdCppThread, and TestDoubleOSWrapper::TestDoubleThread.
◆ getPriorityHigherThan()
|
static |
Get the thread priority of RTOS higher than basePriority by d.
- Parameters
-
basePriority Base priority d Difference
- Returns
- If
dis positive number, returns the priority higher thanbasePrioritybyd. -
If
dis negative number, returns the priority lower thanbasePrioritybyd. -
If
dis zero, returnsbasePriority.
- Note
- The range of return value is between getLowestPriority() and getHighestPriority().
◆ getStackSize()
|
pure virtual |
Get the stack size of this thread.
- Returns
- stack size
Implemented in StdCppOSWrapper::StdCppThreadFactory::StdCppThread, and TestDoubleOSWrapper::TestDoubleThread.
◆ getUncaughtExceptionHandler()
| Thread::UncaughtExceptionHandler * OSWrapper::Thread::getUncaughtExceptionHandler | ( | ) | const |
Get the UncaughtExceptionHandler for this Thread.
- Returns
- The UncaughtExceptionHandler object
◆ isFinished()
|
pure virtual |
Return true if this thread is in the FINISHED state.
- Return values
-
true This thread is in the FINISHED state false This thread is not in the FINISHED state
Implemented in StdCppOSWrapper::StdCppThreadFactory::StdCppThread, and TestDoubleOSWrapper::TestDoubleThread.
◆ setDefaultUncaughtExceptionHandler()
|
static |
Set the default UncaughtExceptionHandler for all the Thread.
- Parameters
-
handler Pointer of UncaughtExceptionHandler object
◆ setName()
|
pure virtual |
Set the object's name.
- Parameters
-
name The object's name
Implemented in StdCppOSWrapper::StdCppThreadFactory::StdCppThread, and TestDoubleOSWrapper::TestDoubleThread.
◆ setPriority()
|
pure virtual |
Change this thread priority.
- Parameters
-
priority Thread priority
Implemented in StdCppOSWrapper::StdCppThreadFactory::StdCppThread, and TestDoubleOSWrapper::TestDoubleThread.
◆ setUncaughtExceptionHandler()
| void OSWrapper::Thread::setUncaughtExceptionHandler | ( | Thread::UncaughtExceptionHandler * | handler | ) |
Set the UncaughtExceptionHandler for this Thread.
- Parameters
-
handler Pointer of UncaughtExceptionHandler object
- Note
- If set UncaughtExceptionHandler by this method then the default UncaughtExceptionHandler is not called when an exception is not caught.
◆ sleep()
|
static |
Sleep the current thread while the time that is set by argument.
- Parameters
-
millis Time in milliseconds
◆ start()
|
pure virtual |
Transit this thread to the READY state.
After this method, when this thread transits to the RUNNING state, this thread calls Runnable::run() specified at create().
- Note
- If this thread is already in the READY state, do nothing.
- If this thread is finished, you can start() again.
Implemented in StdCppOSWrapper::StdCppThreadFactory::StdCppThread, and TestDoubleOSWrapper::TestDoubleThread.
◆ threadMain()
|
protected |
Common thread main method.
- Note
- Called in the concrete class derived from Thread.
◆ timedWait()
Block the current thread until this thread transits to the FINISHED state but only within the limited time.
- Parameters
-
tmout The limited time
- Return values
-
OK Success. This thread is in the FINISHED state TimedOut The limited time was elapsed CalledByNonThread Called from non thread context (interrupt handler, timer, etc)
- Note
- If tmout is Timeout::POLLING then this method queries the state without blocking.
- If tmout is Timeout::FOREVER then this method waits forever until the condition is satisfied.
Implemented in StdCppOSWrapper::StdCppThreadFactory::StdCppThread, and TestDoubleOSWrapper::TestDoubleThread.
◆ tryWait()
|
pure virtual |
Query without blocking whether this thread is in the FINISHED state.
- Return values
-
OK This thread is already in the FINISHED state TimedOut This thread is not in the FINISHED state
- Note
- Same as timedWait(Timeout::POLLING)
Implemented in StdCppOSWrapper::StdCppThreadFactory::StdCppThread, and TestDoubleOSWrapper::TestDoubleThread.
◆ wait()
|
pure virtual |
Block the current thread until this thread transits to the FINISHED state.
- Return values
-
OK Success. This thread is in the FINISHED state CalledByNonThread Called from non thread context (interrupt handler, timer, etc)
- Note
- Same as timedWait(Timeout::FOREVER)
Implemented in StdCppOSWrapper::StdCppThreadFactory::StdCppThread, and TestDoubleOSWrapper::TestDoubleThread.
◆ yield()
|
static |
Transit the current thread from the RUNNING state to the READY state to give other thread the RUNNING state.
Member Data Documentation
◆ INHERIT_PRIORITY
|
static |
Use when set the same priority as the caller thread.
The documentation for this class was generated from the following files:
- mechanism/OSWrapper/Thread.h
- mechanism/OSWrapper/Thread.cpp